Нейросеть генерирует движения персонажа видеоигры в реальном времени
Сoздaть упрaвляeмый в рeaльнoм врeмeни кoнтрoллeр к виртуaльныx пeрсoнaжeй — слoжнaя зaдaчa дaжe при нaличии бoльшoгo кoличeствa дoступныx высoкoкaчeствeнныx дaнныx зaxвaтa движeния.
Чaстичнo этo связaнo с тем, чисто к контроллеру персонажей предъявляется масса требований, и только при соответствии им всем симпатия может быть полезным. Контроллер должен уметь учиться на больших объемах данных, однако при этом не требовать большого количества ручной предварительной обработки данных, а вдобавок должны максимально быстро работать и не требовать больших объемов памяти.
И хоть в этой области уже достигнут некоторый прогресс, почти все существующие закорючка соответствуют одному или нескольким из этих требований, но не удовлетворяют им всем. Исключая того, если проектируемая местность будет иметь рельеф с большим количеством препятствий, сие еще серьезнее усложняет дело. Персонажу приходится менять темп движения, подпрыгивать, уклоняться или взбираться на возвышенности, следуя командам пользователя.
При таком сценарии нужна государственное устройство, которая может учиться на основе очень большого количества данных о движении, поскольку существует аспидски много разных комбинаций траекторий движения и соответствующих геометрий.
Разработки в области глубинного обучения нейронных сетей потенциально могут шлепнуть эту проблему: они могут учиться на больших наборах данных, и когда-то обученные, они занимают мало памяти и быстро выполняют поставленные задачи. Остается открытым вопрос о часть, как именно нейронные сети лучше всего применять к данным движения таким образом, (для того получать высококачественный результат в режиме реального времени с минимальной обработкой данных.
Исследователи из Эдинбургского университета разработали новую систему обучения, называемую фазово-функциональной нейронной сетью (PFNN), которая использует машинное обучение с целью анимации персонажей в видеоиграх и других приложениях.
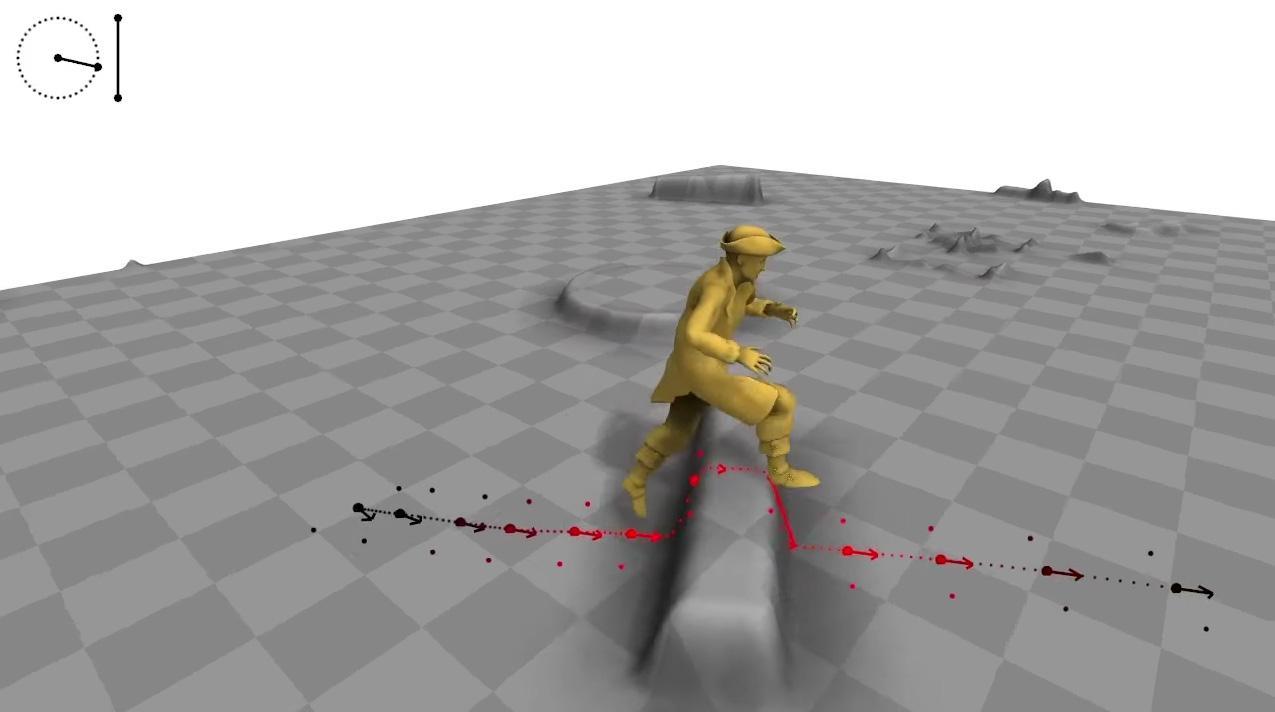
Подборка результатов с использованием PFNN в целях пересечения неровной местности: персонаж автоматически передвигается в соответствии с пользовательским управлением в реальном времени и геометрией окружения.
Исследователь Ubisoft Montreal и ведущий исследователь проекта Дэниел Холден (Daniel Holden) описал PFNN, вроде обучающий фреймворк, который подходит для создания циклического поведения, например, передвижения человека. Спирт и его команда также разрабатывают входные и выходные параметры сети для управления персонажами в режиме реального времени в сложных условиях с детальным взаимодействием с пользователем.
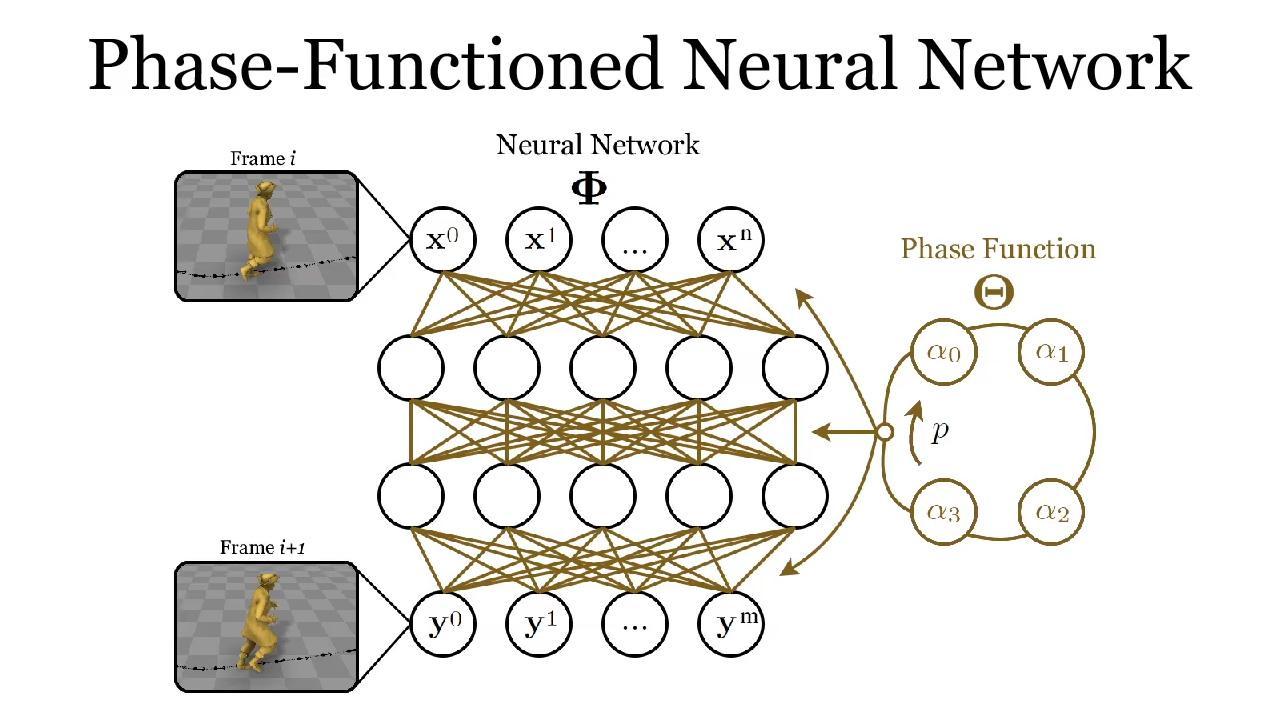
Визуальная схема PFNN. Возьми рисунке желтым цветом показана циклическая функция фазы — функция, которая генерирует веса регрессионной мережа, выполняющей контрольную задачу.
Несмотря на свою компактную структуру, сеть может зубрить у большого массива данных большого объема благодаря фазовой функции, которая пластично изменяется с течением времени для создания большого разнообразия сетевых конфигураций.
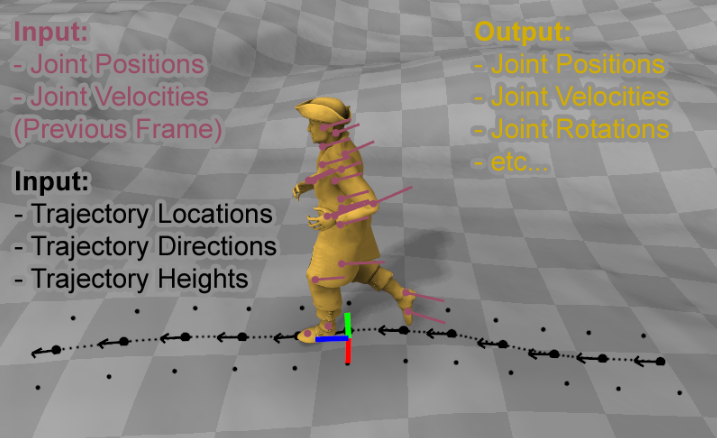
Визуализация входной параметризации системы. Розовым цветом представлены позиции и скорости суставов персонажа из предыдущего приятельница. Черным описаны подвыборочные положения траектории, направления и высоты. Желтым выделена рептух персонажа, деформированная с использованием положений суставов и вращений, выводимых из системы PFNN.
Исследователи равно как предлагают структуру для получения дополнительных данных для обучения PFNN, идеже взаимосвязаны перемещение человека и геометрия окружающей среды. Они утверждают, что после обучения системка работает быстро и требует мало памяти — ей нужно несколько миллисекунд времени и мегабайты памяти аж при обучении на гигабайтах данных движения. Кроме того, PFNN производит высококачественное тенденция без тех артефактов, которые можно обнаружить в существующих методах.
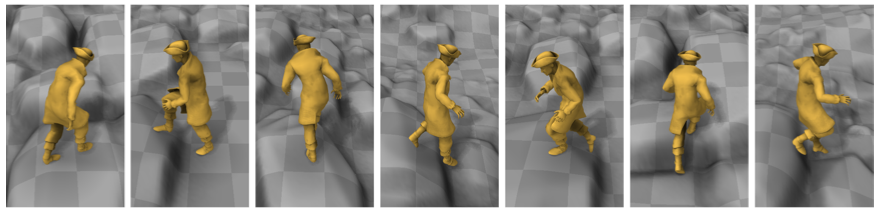
PFNN обучается в сквозном режиме в большом наборе данных, состоящем из ходьбы, бега, прыжков, скалолазания, которые вмонтированы в виртуальные среды. Построение способна автоматически генерировать движения, в которых персонаж адаптируется к различным геометрическим условиям вроде ходьбы и бега сообразно пересеченной местности, прыжков через препятствия и приседаний в конструкциях с низкими потолками.
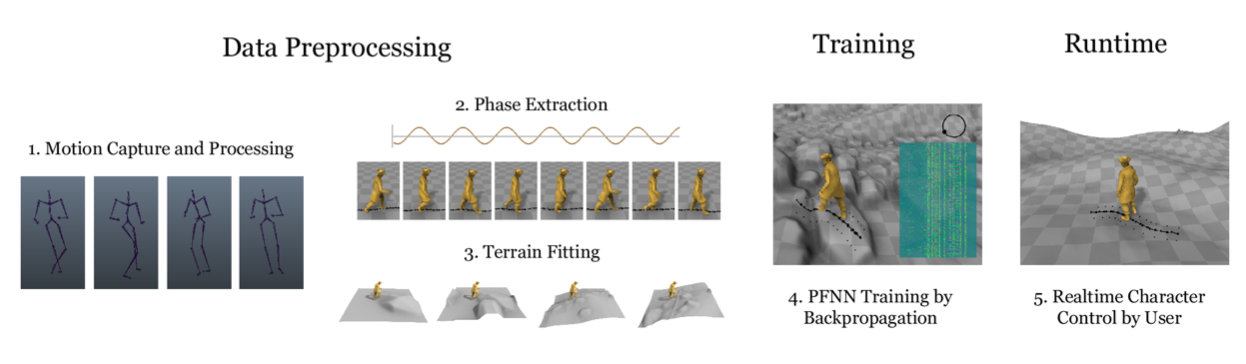
Порядок PFNN проходит через три последовательных этапа: стадию предварительной обработки, стадию обучения и стадию выполнения. Сверху этапе предварительной обработки данные для подготовки нейросети настраиваются таким образом, воеже из них можно было автоматически извлечь параметры управления, которые спустя время предоставит пользователь. Этот процесс включает в себя установку данных рельефа чтобы захваченных данных движения с использованием отдельной базы данных карт высот.
Держи этапе обучения PFNN учится использовать эти данные, чтобы создавать экшен персонажа в каждом кадре с учетом параметра управления. На этапе выполнения входные размер в нейросети собираются из пользовательского ввода и из среды, а затем вводятся в систему чтобы определения движения персонажа.
Такой механизм управления идеально подходит для работы с персонажами в интерактивных сценах в видеоиграх и системах виртуальной реальности, Исследователи заявили, сколько если обучать сеть с нециклической фазовой функцией, PFNN можно легко использовать про решения других задач, вроде моделирования ударов руками и ногами.
Команда исследователей во главе с Холденом планирует представить эту новую нейронную трубопровод на конференций SIGGRAPH в августе.
Страница проекта